Menschlicher Fahrstil statt Roboter-Logik: Teslas neues FSD-Patent entschlüsselt
Gleichzeitig liefert das Dokument die mathematische Erklärung für ein Versprechen, das KI-Chef Ashok Elluswamy im Rahmen der jüngsten Quartalszahlen gab: die Abwärtskompatibilität für ältere Fahrzeuge. Obwohl die Rechenleistung der betagten Hardware-3-Computer (HW3) laut Management nicht für den komplett fahrerlosen Robotaxi-Dienst ausreicht, sollen diese über das anstehende v14-Lite-Update die exakt gleiche, menschliche Fahrlogik erhalten. Das Patent zeigt, dass der Schlüssel hierzu nicht in teurerer Hardware, sondern in einer radikal gesteigerten Software-Effizienz liegt.
Das Problem der Urzeit: Warum Brute-Force-Autonomie scheitern musste
Ältere Autopilot-Generationen und FSD-Versionen vor der Version v12 basierten auf Millionen Zeilen heuristischem C++-Code. Kam das Fahrzeug an eine komplexe, unübersichtliche Kreuzung, versuchte der Bordcomputer eine mathematische Brechstangen-Methode (Brute-Force). Er berechnete für jedes erfasste Objekt zeitgleich jede physikalisch denkbare Zukunftstrajektorie: den exakten Pfad des Fußgängers, den Bremsweg des Lasters und die Wahrscheinlichkeit, dass ein Radfahrer ausschert.
Dieser Ansatz erfordert astronomische Rechenleistungen und führt bei dichten Verkehrsszenarien unweigerlich zu Systemlatenzen. Wenn der Chip im Millisekundentakt Milliarden Optionen kalkulieren muss, verarbeitet er Daten im Dauerstress. Das Resultat im Real-World-Impact war das allseits bekannte, unnatürlich zögerliche Fahrverhalten, das menschliche Hintermänner regelmäßig zu ungeduldigem Hupen oder riskanten Überholmanövern verleitete.
Der hierarchische Knotengraph: Selektives Denken wie ein Mensch
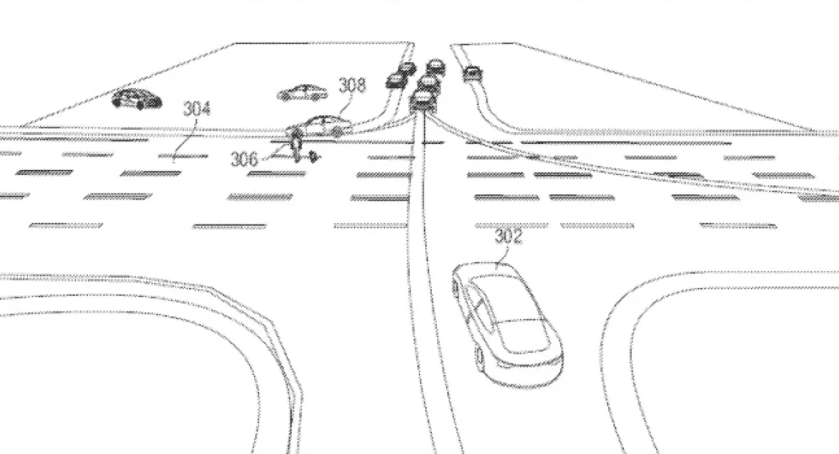
Das neue Patent bricht radikal mit dieser Programmier-Philosophie. Tesla ersetzt das ungerichtete Durchrechnen aller Optionen durch eine schlanke Entscheidungsarchitektur auf Basis eines sogenannten „hierarchischen Knotengraphen“. Das System baut einen hocheffizienten Entscheidungsbaum auf, der sich ausschließlich an konkreten Zielen und sequenziellen Interaktionen orientiert. Der Computer erzeugt zunächst einen Ziel-Knoten (Goal Node), beispielsweise das Durchführen eines ungeschützten Linkskorridors über zwei Spuren.
Basierend auf diesem Ziel filtert das neuronale Netz die Umgebung und erstellt Interaktions-Knoten (Interaction Nodes) nur für die Verkehrsteilnehmer, die für dieses Ziel eine echte Relevanz besitzen. Der unbeteiligte Fußgänger auf dem fernen Gehweg wird ignoriert. Die KI verknüpft die verbleibenden Knoten zu einer logischen Kette: Vorfahrt gewähren für den herannahenden Querverkehr, einscheren hinter dem blauen Kombi, beschleunigen. Der Rechenaufwand schrumpft durch diese gezielte Fokussierung auf einen Bruchteil zusammen.
| Parameter der FSD-Architektur | Altes System (Heuristischer C++ Code / Pre-v12) | Neues System (Hierarchischer Knotengraph / v14) |
|---|---|---|
| Berechnungsmethode | Brute-Force (Trajektorien aller Objekte gleichzeitig) | Zielorientierte Selektion via Nodal Graph |
| Primärer Fokus im Algorithmus | Reine Physik- und Kollisionsgrenzen | Fahrkomfort, Menschlichkeit und Interventions-Score |
| Rechenlast im Stadtverkehr | Extrem hoch (Führt zu Systemlatenz und Ruckeln) | Minimal (Durch aggressives Abschneiden schlechter Äste) |
| Kompatibilität mit Hardware 3 | Ausgelastet (Keine Kapazitäten für komplexe Manöver) | Voll kompatibel via optimiertem v14-Lite-Zweig |
| Fahrcharakter im Alltag | Roboterhaft, übervorsichtig, unvorhersehbare Bremsungen | Flüssig, vorausschauend, resolut beim Spurwechsel |
Der menschliche Diskriminator bewertet die Fahrpraxis
Die eigentliche Brillanz der v14-Logik liegt in der psychologischen Bewertung dieser Bewegungsknoten. Das Fahrzeug teilt jeder potenziellen Flugbahn einen spezifischen Wert (Node Score) zu. Die Einhaltung der physikalischen Sicherheitsgrenzen zur Vermeidung von Kollisionen steht nach wie vor an oberster Stelle. Doch direkt dahinter fließen drei neue, rein menschliche Bewertungsfaktoren in den Algorithmus ein, um die Fahrspur zu verfeinern:
- Comfortability (Komfort): Würde dieses Manöver die Passagiere abrupt in die Gurte werfen oder den Kaffee in der Mittelkonsole verschütten?
- Intervention Likelihood (Eingriffswahrscheinlichkeit): Ist die Flugbahn so forsch oder unnatürlich gewählt, dass ein menschlicher Fahrer Panik bekommt und instinktiv das Lenkrad reißt?
- The Human-Like Discriminator (Menschlichkeits-Filter): Würde ein erfahrener Autofahrer aus Fleisch und Blut in dieser Situation exakt so agieren?
Das Fahrzeug vergleicht seine potenziellen Manöver permanent mit einer gigantischen, cloudbasierten Datenbank aus Millionen von realen menschlichen Fahrprofilen. Indem das System gezielt nach der Flugbahn mit dem höchsten Score im Menschlichkeits-Filter sucht, kopiert es den dynamischen, vorausschauenden Fluss eines routinierten Fahrers. Mathematische Exaktheit weicht zugunsten von natürlicher Intuition.
Aggressive Pruning: Das Geheimnis hinter v14-Lite für HW3-Autos
Diese kontinuierliche Benotung der Knoten ermöglicht eine fundamentale Abkürzung im Zentralrechner, die im Patent als „Aggressive Pruning“ (aggressives Beschneiden des Entscheidungsbaums) definiert wird. Da das System im Keim erkennt, welche Äste des Graphen schlechte Scores erzielen, löscht der Algorithmus diese unbrauchbaren Pfade augenblicklich aus dem aktiven Arbeitsspeicher. Sieht die KI, dass das Vorbeidrängeln an einem Müllauto die Interventionswahrscheinlichkeit drastisch erhöht, wird die Berechnung dieser Variante sofort gestoppt.
Dieses aggressive Abschneiden unrentabler Rechenpfade ist die technologische Lebensversicherung für ältere Tesla-Modelle. Da der Computer keine Kapazitäten mehr an die Analyse unsinniger Optionen verschwendet, sinkt die Netto-Prozessorlast im dichten urbanen Raum massiv. Das ist der mathematische Trick hinter v14-Lite: Die schlanke Software-Struktur erlaubt es den älteren HW3-Chips, die hochkomplexe Verhaltenslogik der Version v14 fehlerfrei auszuführen, ohne unter der Rechenlast zu kapitulieren. Während die Konkurrenz auf immer teurere Sensoren setzt, löst Tesla das Problem über pure Code-Effizienz.
"Indem wir unseren Fahrzeugen beibringen, wie ein Mensch zu priorisieren und schlechte Optionen sofort zu verwerfen, reduzieren wir die mathematische Komplexität des autonomen Fahrens um ein Vielfaches. Das erlaubt uns Feature-Parität auf Hardware-Generationen, die viele Mitbewerber längst abgeschrieben hätten."